[AI]Camera Calibration
in AI
Basic Theory
- 3D좌표와 2D좌표를 사용하여 $K$ (3*3 행렬), $R$ (3*3 회전행렬), $t$(3*1 이동벡터)를 찾아 내는 것
Camera Calibration equation
- 3D좌표$( X_{\omega}, Y_{\omega}, Z_{\omega})$와 2D 이미지 투영 좌표$(u,v)$의 방정식
- $\begin{bmatrix} x’ \ y’ \ z’ \end{bmatrix} = \mathbf{P} \begin{bmatrix} X_{\omega} \ Y_{\omega} \ Z_{\omega} \1 \end{bmatrix}$
- $u$=$u’/_w$ $, v$=$v’/_w$
$P$ = $K \times \begin{bmatrix} R t \end{bmatrix}$ - $K$ : Intrinsic Matrix
$\begin{bmatrix} R t \end{bmatrix}$ : Extrinsic Matrix
- $K$ = $\begin{bmatrix} f_x & \gamma & c_x \ 0 & f_y & c_y \ 0 & 0 & 1\end{bmatrix}$
- $f_x , f_y$ : 초점거리 (알반적으로 $f_x = f_y$)
- $c_x , c_y$ : 이미지 평면에서 광학 중심의 x와y 좌표
- $\gamma$ : 축 사이의 기울기 (일반적으로 0)
Camera Calibration Flowchart
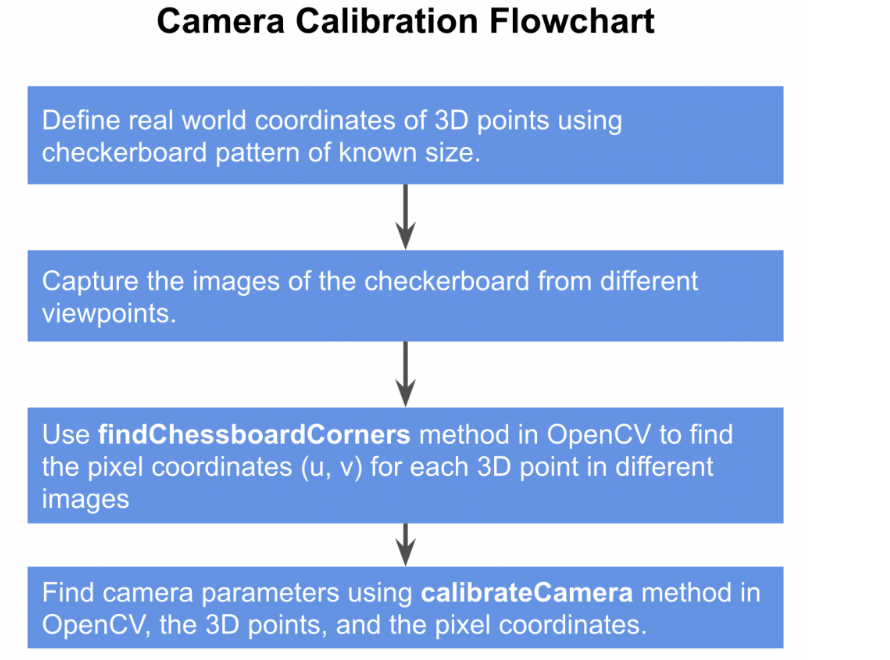
1. 체커 보드를 통하여 3D좌표 정의
CHECKERBOARD = (11,16)
objp = np.zeros((1, CHECKERBOARD[0]*CHECKERBOARD[1], 3), np.float32)
objp[0,:,:2] = np.mgrid[0:CHECKERBOARD[0], 0:CHECKERBOARD[1]].T.reshape(-1, 2)
2. 여러 시점에서 체커 보드 이미지 캡쳐  3. ChessboardCorners 메소드를 통하여 2D좌표 찾기
3. ChessboardCorners 메소드를 통하여 2D좌표 찾기
flag = cv2.CALIB_CB_ADAPTIVE_THRESH+cv2.CALIB_CB_FAST_CHECK+cv2.CALIB_CB_NORMALIZE_IMAGE
for fname in images:
img = cv2.imread(fname)
if _img_shape == None:
_img_shape = img.shape[:2]
else:
assert _img_shape == img.shape[:2],
gray = cv2.cvtColor(img,cv2.COLOR_BGR2GRAY)
ret, corners = cv2.findChessboardCorners(gray, CHECKERBOARD, flag)
if ret == True:
objpoints.append(objp)
cv2.cornerSubPix(gray,corners,(3,3),(-1,-1),subpix_criteria)
imgpoints.append(corners)
4. Camera Calibration하여 매개변수를 찾기
retval, cameraMatrix, distCoeffs, rvecs, tvecs = cv2.calibrateCamera(objectPoints, imagePoints, imageSize)
- objectPoints : 3D 점 벡터로 구성된 벡터. 외부 벡터는 패턴 사진의 수만큼 요소를 포함
- imagePoints : 2D 이미지 점 벡터로 구성된 벡터
- imageSize : 이미지의 크기
- cameraMatrix : 내부 카메라 행렬 ( $K$ )
distCoeffs : 렌즈 왜곡 계수 ( $\begin{bmatrix} R t \end{bmatrix}$ ) - rvecs : 회전은 3×1 벡터로 지정. 벡터의 방향은 회전 축을 지정하고 벡터의 크기는 회전 각을 지정 ( $R$ )
- tvecs : 3×1 이동 벡터 ( $t$ )
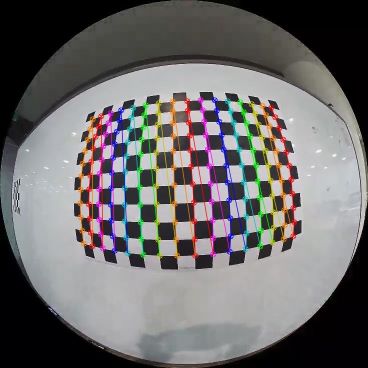
Experimental result
- Origin Image

- Find Corners
- Result

